

Classifier Interface Reference
A classifier object contains a set of GestureModel's with which to classify gesture instances against. More...
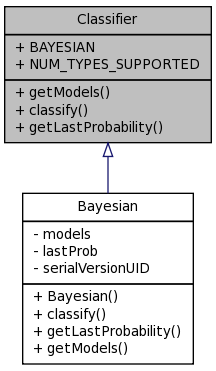
Inheritance diagram for Classifier:
Public Member Functions | |
| Vector< GestureModel > | getModels () |
| Returns the set of GestureModels that form this Classifier. | |
| GestureModel | classify (Vector< Accel3D > g) |
| Classifies a given gesture against the Classifier's set of GestureModels. | |
| double | getLastProbability () |
| Returns the probability of the last classification. | |
Static Public Attributes | |
| static final int | BAYESIAN = 0 |
| This is the Classifier type index for Bayesian classifiers. | |
| static final int | NUM_TYPES_SUPPORTED = 1 |
| Number of classifier types implemented (to be changed if extended). | |
Detailed Description
A classifier object contains a set of GestureModel's with which to classify gesture instances against.
Member Function Documentation
| GestureModel classify | ( | Vector< Accel3D > | g | ) |
Classifies a given gesture against the Classifier's set of GestureModels.
- Returns:
- the GestureModel matched with maximum probability (or null if a match failed)
Implemented in Bayesian.
| double getLastProbability | ( | ) |
Returns the probability of the last classification.
- Returns:
- the double representing the probability of the last classification
Implemented in Bayesian.
Here is the caller graph for this function:

| Vector<GestureModel> getModels | ( | ) |
Returns the set of GestureModels that form this Classifier.
- Returns:
- a Vector of GestureModels that form the Classifier
Implemented in Bayesian.
Member Data Documentation
final int BAYESIAN = 0 [static] |
This is the Classifier type index for Bayesian classifiers.
final int NUM_TYPES_SUPPORTED = 1 [static] |
Number of classifier types implemented (to be changed if extended).
The documentation for this interface was generated from the following file:
- /Users/dev/Documents/SVN brazos.cs.tcu.edu/trunk/FROG/src/frog/Classifier.java